Die Modellbildung und Simulation wurde bisher mit den Python-Paketen Scipy, control und ioSys rein textbasiert durchgeführt. Eine grafische Modellbildung und Simulation auf Basis eines Wirkungsplans wäre aber sehr hilfreich. Beispielgebend sind in diesem Zusammenhang Simulink, WinFact und Xcos. Allerdings ist nur Xcos als Teil des Scilab-Paketes kostenlos.
Eine Erweiterung der Python Control Library um eine grafische Programmieroberfläche soll mit Hilfe des freien Software-Paketes pysimCoder erfolgen. pysimCoder bietet jedoch schon jetzt die Möglichkeit Simulationen und Berechnungen in Python Control miteinander zu verknüpfen. Das I-T1-Beispiel Listing 6.5 grafisch umgesetzt in pysimCoder hat den folgenden Wirkungsplan
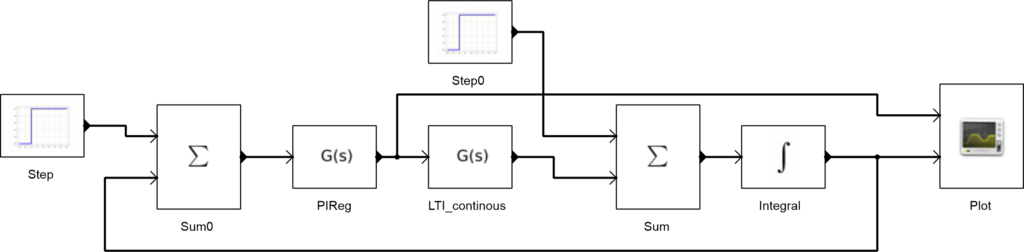
und die Python-Parameterdatei
from control.matlab import * Kp= 1.0 # Verstärkung Strecke T1 = 0.2 # Zeitkonstante Strecke = tf(Kp,[T1, 1]) # P-T1 vom I-T1 a = 4; K = 1.0/(a*Kp*T1) Tn = T1*a**2 # Regler gemäß Sym. Optimum Regler = tf([K*Tn, K],[Tn, 0])
Die Berechnung des Reglers wird ausgelagert in das Python-Programm und die Simulation greift auf diese Daten zu. pysimCoder wurde von Roberto Bucher [https://github.com/robertobucher] für Linux-Systeme entwickelt, wobei neben der Simulation auch die Generierung von echtzeitfähigem Code für Mikro-Controller Zweck der Software ist. Interessant ist die Möglichkeit pysimCoder auf einem Windows-System auszuführen, wobei das Windows Subsystem für Linux (WSL) verwendet wird.
WSL wird im Administrator-Modus im Fenster Eingabeaufforderung mit wsl –install installiert. Nach einem Neustart steht das Linux-Derivat Ubuntu zur Verfügung und nach Wahl des Namens und Passwort ist Linux unter Windows verfügbar. In der Ubuntu-Konsole sollte nach Eingabe von sudo apt update und sudo apt upgrade das Advanced Packaging Tool (APT) aktuell sein. pysimCoder kann nun gemäß Installationsanleitung [https://github.com/robertobucher/pysimCoder] installiert werden.
In der Ubuntu-Konsole können wir mit dem Befehl explorer.exe den Windows Dateimanager nutzen und auf die “Linux-Dateien“ zugreifen. Danach geben wir pysimCoder ein und sollten die grafische Bedienoberfläche sehen.
Das I-T1-Beispiel und der Portalkran ioSys-Listing Seite 253 sind in der folgenden zip-Datei:
Die grafische Simulation des Smith-Prädiktors für den Beispielregelkreis gemäß Kapitel 6.8 findet sich in der nächsten Datei: